Su Marte, Ingenuity ha volato per la diciassettesima volta. Il volo è stato eseguito domenica 5 dicembre, e il JPL ha confermato la riuscita questa mattina, 8 dicembre. Ingenuity ha volato per 187 metri verso Nord Est, continuando il suo viaggio per ritornare al Octavia E. Butler Landing Site, il luogo di atterraggio su Marte. Il volo è stato eseguito correttamente, se non fosse per una perdita delle comunicazioni nell’ultima parte del volo, poco prima dell’atterraggio di Ingenuity.
La telemetria ottenuta dal JPL si interrompe quando il drone si trovava a 3 metri dalla superficie, dopo che la quota è rimasta stabile a 10 metri per tutto il tragitto. 15 minuti dopo l’atterraggio sono stati inviati ulteriori pacchetti dati da Perseverance. Questi hanno confermato la salute del drone dato che hanno dimostrato la piena efficienza di ricarica delle batterie. Questo può avvenire solo se il pannello solare è posizionato in orizzontale. Viene così confermata, in modo indiretto, la posizione corretta di Ingenuity. Prima di poter pianificare il volo numero 18 la NASA avrà però bisogno della telemetria completa del volo appena concluso. Nonostante questo ci si aspetta di tornare a volare entro due settimane.
I motivi della perdita d’informazioni
La perdita della telemetria nell’ultima fase non è dovuta a un problema di Ingenuity, ma a una perdita del ponte radio con Perseverance. Le comunicazioni con la Terra del drone marziano sono infatti permesse dal preventivo collegamento con il rover. Questo avviene attraverso una trasmissione radio, che non può essere efficace se fra drone e rover sono presenti degli ostacoli fisici. In questo caso sono subentrati degli ostacoli dovuti sia alla geografia di Marte sia alla struttura di Perseverance.
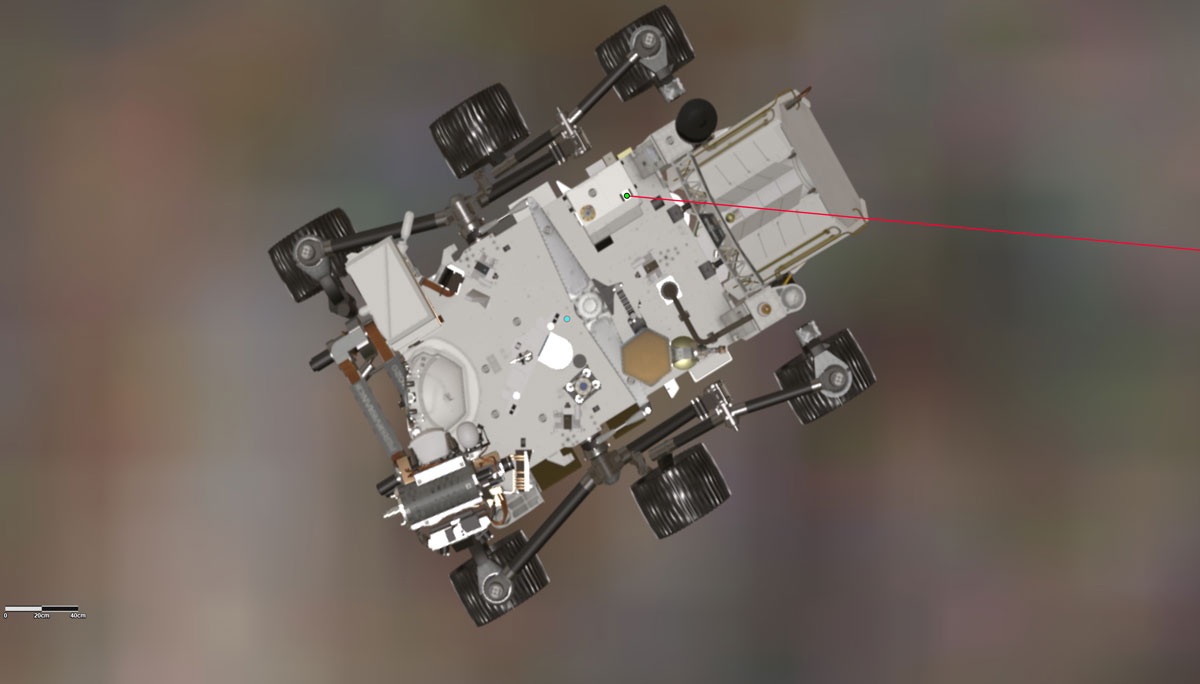
Il drone è infatti atterrato in una posizione opposta all’antenna posizionata sul rover. Fra quest’ultima e Ingenuity si trovava quindi la scocca stessa del rover e il generatore a radioisotopi (RTG). Nella seguente foto la linea rossa collega l’antenna del rover con la posizione dove è atterrato Ingenuity.
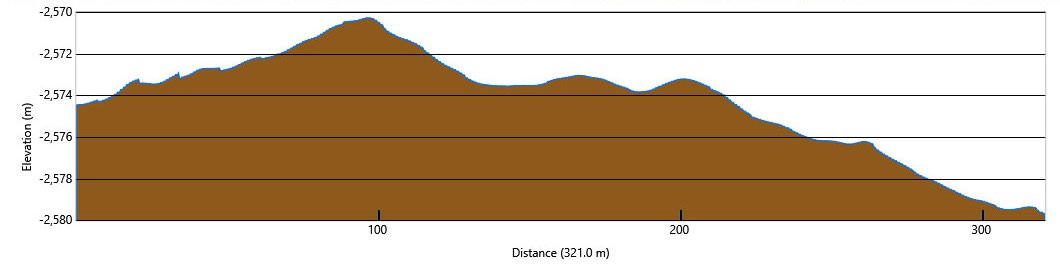
Oltre a questo il drone si è trovato dalla parte opposta di una piccola collina di 4 metri di altezza chiamata Bras. Questa non ha rappresentato un problema per la maggior parte del volo, che si è svolto appunto alla quota di 10 metri, ma solo durante l’ultima fase di discesa. Inoltre, durante la progettazione del volo numero 17 la NASA si era basata sulla posizione prevista di Perseverance, ma quest’ultima è soggetta a variazioni quasi giornaliere in base alle necessità scientifiche.
Le conseguenze sul drone e sui prossimi voli
Ingenuity è stato progettato per sopravvivere a questa mancanza di collegamento con Perseverance. I voli sono infatti automatici, e in mancanza di un collegamento diretto con il rover si spegne in automatico aspettando nuove informazioni. Questa situazione si prevede infatti che succederà nuovamente in futuro, forse anche durante il volo 18. Avute le informazione del volo 17, il JPL prevede che Ingenuity si muoverà di altri 200 metri circa verso Nord-Est, verso il confine della zona South Séíitah. Gli ingegneri della NASA cercheranno ovviamente di programmare i prossimi voli in modo da evitare il più possibile questi blackout d’informazioni.
Nella seguente mappa interattiva è possibile vedere in tempo reale la posizione sia di Ingenuity che del rover Perseverance.
Continua a seguire Astrospace.it sul canale Telegram, sulla pagina Facebook, sul nostro canale Youtube e ovviamente anche su Instagram. Non perderti nessuno dei nostri articoli e aggiornamenti sul settore aerospaziale e dell’esplorazione dello spazio.