Nissan Motor Co. ha annunciato lo sviluppo di un prototipo di rover lunare in collaborazione con l’Agenzia spaziale giapponese (JAXA). L’annuncio è avvenuto durante l’evento Nissan Futures nel quale esperti di tutto il mondo discutono sul futuro della mobilità. Durante la presentazione del nuovo concept di crossover Ariya, modello completamente elettrico, Nissan ha colto l’occasione per presentare anche il prototipo di rover lunare sviluppato con JAXA.
Un’azione congiunta tra lo Space Exploratione Innovation Hub Center di JAXA, esperto in ricerca sui rover lunari e l’esperienza di Nissan sulla controllabilità di guida. Tale sinergia mira allo sviluppo di una classe di rover in grado di attraversare senza intoppi il “polveroso” suolo lunare. In questo modo, nè la regolite nè le rocce saranno un problema, ma sempre con un occhio di riguardo verso l’efficienza energetica.
Da crossover a rover lunare
Come riportato sopra, lo sviluppo del prototipo di rover lunare prende spunto dal nuovo concept interamente elettrico del crossover Ariya. La base di partenza è costituita proprio dalla tecnologia di cui dispone, ovvero la “e-4ORCE all-wheel-control” sviluppata da Nissan. Di cosa si tratta? Altro non è che un sistema con doppio motore elettrico (davanti e dietro) e trazione integrale all-wheel-control. Quest’ultimo è in grado di trasmettere una coppia immediata a tutte e quattro le ruote motrici, in modo tale da offrire potenza bilanciata e manovabrilità.
Chiaramente, la “e” richiama all’uso di tecnologie totalmente elettriche sviluppate da Nissan; accanto, “4ORCE” ci mette in risalto la potenza dei motori e la presenza di 4 ruote motrici. Il gioco di parole tra 4ORCE e FORCE a questo punto è presto spiegato. Si parte quindi da efficienza elettrica combinata a stabilità delle ruote (interamente indipendenti) per lo sviluppo del rover lunare.
“Quattro ruote” sulla Luna
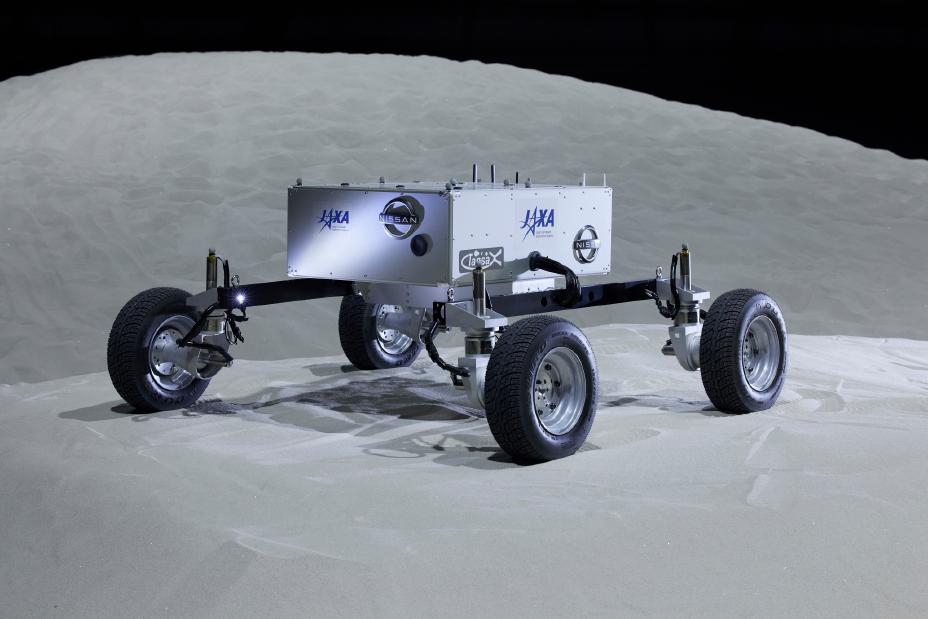
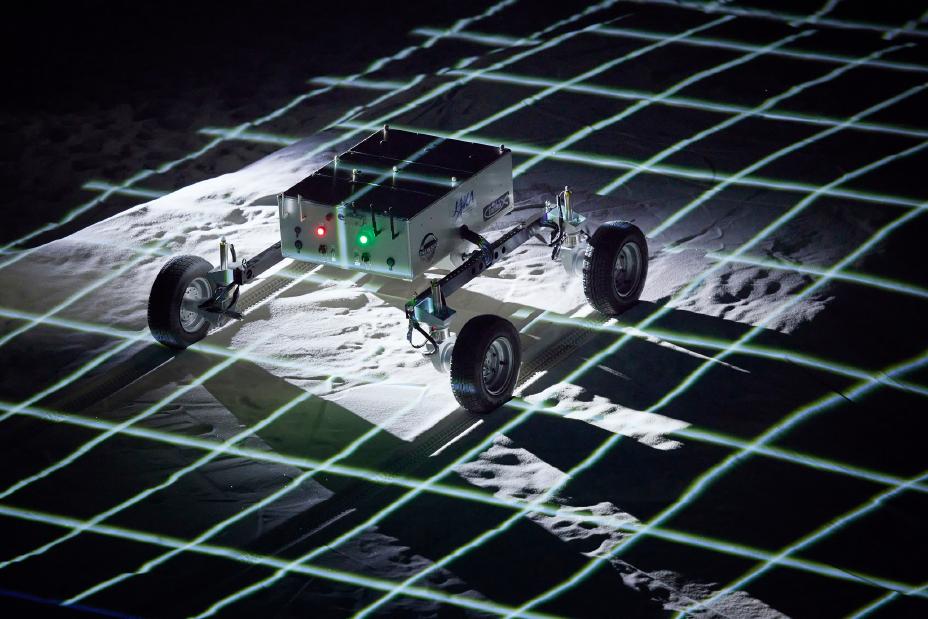
Avendo chiara in mente la base di partenza, è ora di focalizzarsi sul rover lunare. Nella ricerca che Nissan e JAXA stanno conducendo, il focus è su un’evoluzione del sistema e-4ORCE che possa consentire performance adeguate su terreni polverosi come quello lunare. Questo sistema deve essere in grado di non far “insabbiare” le ruote nè farle slittare, come spesso avviene su terreni similari sulla Terra. Per venire incontro a queste esigenze, Nissan ha sviluppato un sistema di controllo in grado di adattarsi alle condizioni del suolo. In questo modo, il sistema di guida sarà in grado di modulare la forza che si distribuirà su ogni singola ruota a seconda delle caratteristiche del terreno.

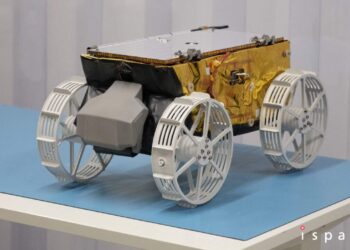
Prendendo quindi spunto dall’auto, il rover lunare sviluppato da Nissan e JAXA dovrebbe disporre di due motori elettrici (uno per ogni asse) ad alta efficienza energetica. Al contempo, il rover dovrebbe disporre di quattro ruote motrici modulate in maniera del tutto indipendente così da non rimanere mai impantanate.
I motori saranno in grado di fornire l’energia necessaria a ogni singola ruota, diminuendola gradualmente sul suolo polveroso, In questo modo le ruote non avranno la possibilità di slittare. D’altra parte, e Nissan ce ne dà una prova tangibile, un rover non va visto come un qualcosa di tanto lontano da un’automobile che percorre “le polverose e impervie strade” della Luna. Nissan, con questo progetto, si conferma ancora una volta una delle aziende dell’automotive più interessate all’esplorazione spaziale, ma non certo l’unica.
Continua a seguire Astrospace.it sul canale Telegram, sulla pagina Facebook, sul nostro canale Youtube e ovviamente anche su Instagram.Non perderti nessuno dei nostri articoli e aggiornamenti sul settore aerospaziale e dell’esplorazione dello spazio.