Durante questi decenni di esplorazione spaziale ci siamo abituati a vedere rover come Spirit, Opportunity, Curiosity e il prossimo Perseverance percorrere chilometri sulla superificie del desertico e roccioso Marte. Con le loro ruote metalliche si muovono attraversando antichi delta fluviali e pendii più o meno scoscesi. Le forti pendenze e gli aspri terreni del pianeta rosso hanno però fatto emergere molte volte problemi di percorso, costringendo i tecnici da terra a trovare strade alternative per aggirare gli ostacoli insormontabili.

Per i rover, fare strada aggiuntiva presenta però un grave problema, poiché le ruote si consumano costantemente, come dimostrano le ultime foto di Curiosity. Con Perserverance il problema sarà attenuato, ma non risolto, grazie a tecniche di costruzioni differenti, basate sull’utilizzo dell’alluminio e del titanio. Oltre all’usura il terreno marziano può presentare altre insidie, come fu per Spirit, che nel 2011 rimase bloccato in un cratere a causa di una ruota mal funzionante, probabilmente danneggiata da una pietra. Per risolvere definitivamente questo problema, la NASA da anni progetta un nuovo tipo di rover, chiamato DuAxel.
Axel, la prima idea per scalare argini e pareti rocciose
Come già detto, i rover si spostano sulla superficie di Marte fino a quando non trovano un ostacolo impossibile da superare. Questo costringe gli scienziati a cambiare obbiettivo o percorso. Grazie a DuAxel, un robot costruito ad hoc per queste situazioni, le future missioni robotiche marziane potrebbero non avere più di questi problemi.
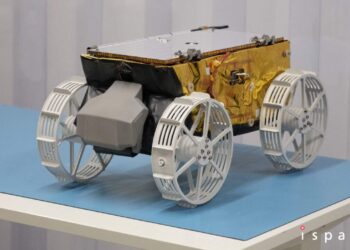
Il DuAxel è costituito, come dice il nome stesso, da una coppia di rover a due ruote, chiamato Axel. Il meccanismo di funzionamento del rover Axel è piuttosto semplice. Ricorda gli hoverboard che usiamo sulla terra e si basa su un design simmetrico e di minima complessità, con tre attuatori per il controllo delle ruote e un collegamento effettuato con un’asta.

Questo collegamento ha diverse funzionalità: oltre a fornire un peso per equilibrare la spinta dovuta alle due ruote, regola anche il posizionamento del rover stesso. In caso di emergenza, può essere usato anche come freno. Grazie alla sua versatilità, Axel può funzionare capovolto e supporta diverse tipologie di ruote: in questo modo può attraversare terreni scoscesi e rocciosi. Per orientarsi vengono sfruttati modelli matematici e sistemi di comunicazione in tempo reale, telecamere e sensori inerziali per la navigazione, in maniera tale da poter evitare in maniera autonoma gli ostacoli. Uno dei possibili utilizzi di un singolo Axel è il collegamento con un rover di maggiori dimensioni. Collegato attraverso un cavo. In questo modo Axel può essere dispiegato per poter accedere in luoghi potenzialmente pericolosi a causa delle difficoltà del terreno.

L’evoluzione in DuAxel
Axel può anche essere attaccato ad un altro rover uguale, creando il DuAxel (forma abbreviata di Dual-Axel). Lo sviluppo di questa configurazione è iniziato circa all’inizio del 2010 e può portare maggiori vantaggi rispetto all’utilizzo di un singolo Axel. Questa configurazione permette di avere un rover capace di dividersi in due sistemi separati, uno fisso e uno mobile, per poter esplorare più agilmente determinate zone impervie.
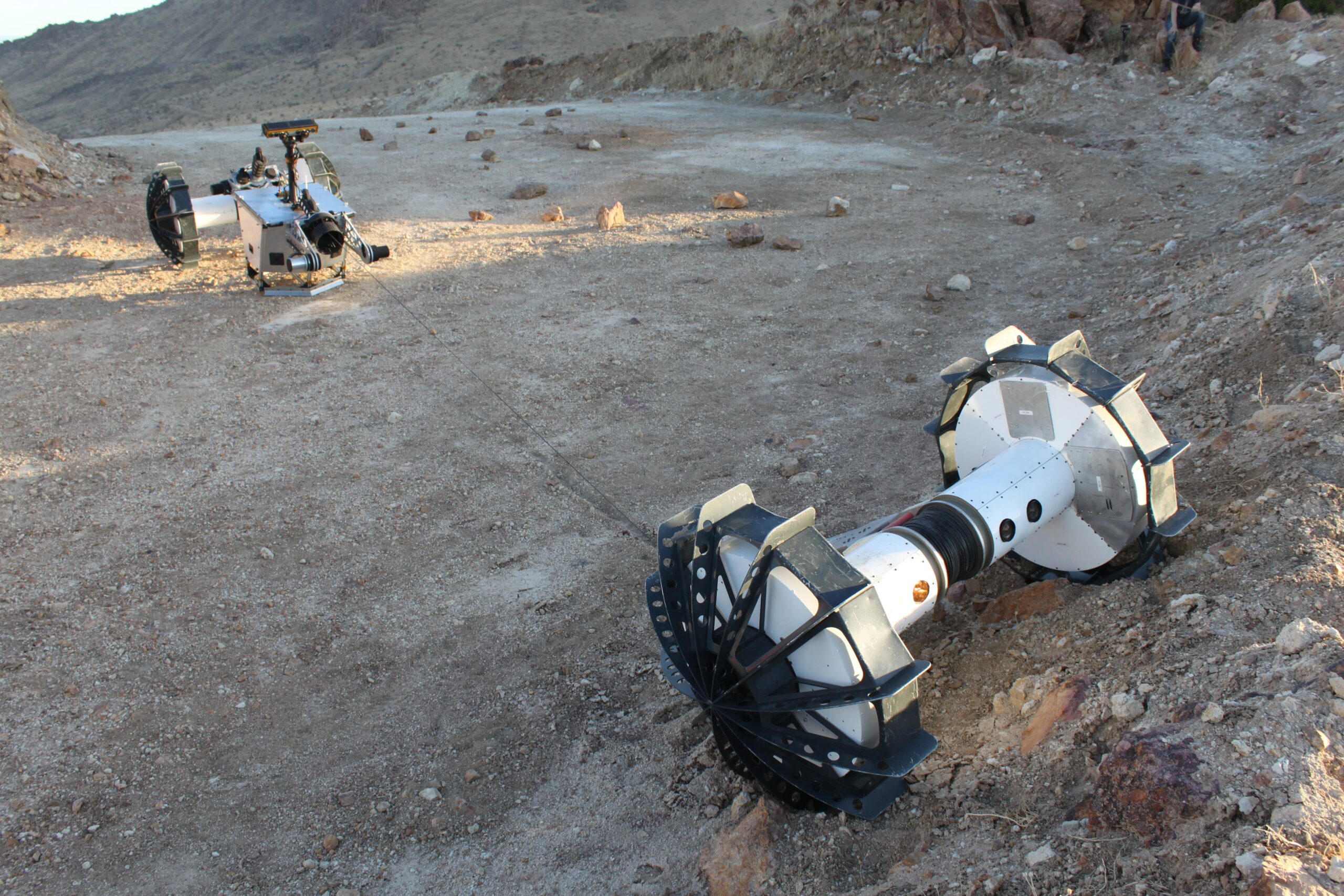
Il rover DuAxel, prima di dividersi, si abbassa e fissa il telaio a terra. Una volta sganciati i due Axel, la parte posteriore è saldamente ancorata al terreno, mentre la parte anteriore è libera di esplorare. A collegarli rimane un cavo che si srotola in base al movimento dell’asse mobile. In questo modo si possono esplorare luoghi inaccessibili, utilizzando strumenti posizionati nei mozzi delle ruote per studiare un luogo che normalmente sarebbe fuori portata.
Un test che simulava il funzionamento del DuAxel è stato svolto questo autunno nel deserto del Mojave da un team del Jet Propulsion Laboratory. Qui il rover è stato sottoposto a una serie di sfide per testarne la versatilità. Secondo Issa Nesnas, robotics technologist del JPL, DuAxel ha funzionato come previsto, dimostrando la sua capacità di sganciare il singolo Axel dopo essersi ancorato al terreno, e di esplorare in maniera autonoma pendii ripidi e rocciosi, dispiegando gli strumenti necessari senza l’utilizzo di un braccio robotico.
Il design e la flessibilità di DuAxel sono pensati per superare crateri, scarpate, ripide paredi di una montagna. Tutti scenari diffusi nei corpi rocciosi nel nostro sistema solare. La grande mobilità del rover e la capacità di accedere a questi luoghi estremi entusiasma anche Laura Kerber, geologa planetaria del JPL, che reputa questo progetto un’occasione importante per l’esplorazione di luoghi in cui potrebbero essere trovate prove fondamentali dell’esistenza passata o presente della vita, come grotte in cui una volta scorrevano fiumi sotterranei. Qui, grazie alla protezione di strati rocciosi dalle radiazioni, potrebbero essersi conservate forme di vita microbiotiche.
DuAxel permetterebbe quindi l’accesso ai terreni più estremi non solo di Marte, ma anche della Luna, di Mercurio e di alcuni corpi rocciosi come le lune di Giove. Inoltre, nella sua configurazione a due o tre assi, può anche essere utilizzato come trasportatore di carichi per i futuri insediamenti umani sulla Luna o su Marte, funzionando da vero e proprio carrello autonomo. Inoltre, un sistema ridondante a più Axel permette anche una facile riparazione.
La storia del progetto
L’esigenza di costruire un rover di questo tipo nasce intorno agli anni ’90, ma solo nel 2006, grazie a nuove osservazioni di Marte, vi è stata una brusca accelerata al progetto. Le immagini della superficie marziana rivelarono dei grandi canali nelle pareti di un cratere. Successivamente la scoperta di quelli che sembravano essere deflussi stagionali di acqua liquida chiamati “recurring slope lieae”, rappresentati da bande scure nelle immagini satellitari, crebbe l’interesse nell’uso di robot per prelevare campioni direttamente in loco.
Curiosity e il futuro Perseverance, non sono progettati per l’esplorazione di questi luoghi poiché i due rover si limitano ad attraversare pendenze di massimo 30 gradi. Di conseguenza il team del JPL ha iniziato a sviluppare il progetto Axel da collegare ad un lander, fermo e ancorato a terra, il quale avrebbe fornito la potenza elettrica, mentre il piccolo rover avrebbe esplorato e utilizzato strumenti come microscopi, trapani e palette per la raccolta di campioni, tutti inseriti nei mozzi delle ruote. L’idea di unire Axel ad un lander più grande presentava delle limitazioni e delle difficoltà: la più difficile da superare consisteva nella precisione dell’atterraggio. Il lander infatti sarebbe dovuto atterrare precisamente in una zona vicina a qualche cratere o pendio permettendo ad Axel poi di effettuare le ricerche scientifiche. Per ovviare a questo problema il team è tornato al progetto Axel originale e ha deciso di legarne due consecutivamente, creando il DuAxel.
Nel seguente video del Jet Propulsion Laboratory è presente una dimostrazione dei primi test del DuAxel.
Nonostante DuAxel sia ancora in fase di progettazione e stia superando i suoi primi test, la squadra di tecnici continua a migliorare la tecnologia sulla quale si basa, pronto ad essere utilizzato per le future missioni di esplorazione spaziale, che potranno diventare un po’ più rischiose di prima.